Demonstration of a PID controller
Arjen Markus (21 may 2019) Using the various packages available in Tcllib and Tklib it is pretty easy to build a simulator like the one shown in the code below. The idea is simple:
- A damped oscillator (a spring with a mass that experiences a resistence against motion) is modelled via a second-order differential equation, a textbook example (see procedure [oscilator])
- The mass, however, also experiences irregular shocks (see the procedure [externalForce]), which causes it to move away from the equilibrium position
- To try and get the mass to stay as close to that equilibrium position a PID controller is used (see the procedure [pidSteering]). It effectively provides a counter force
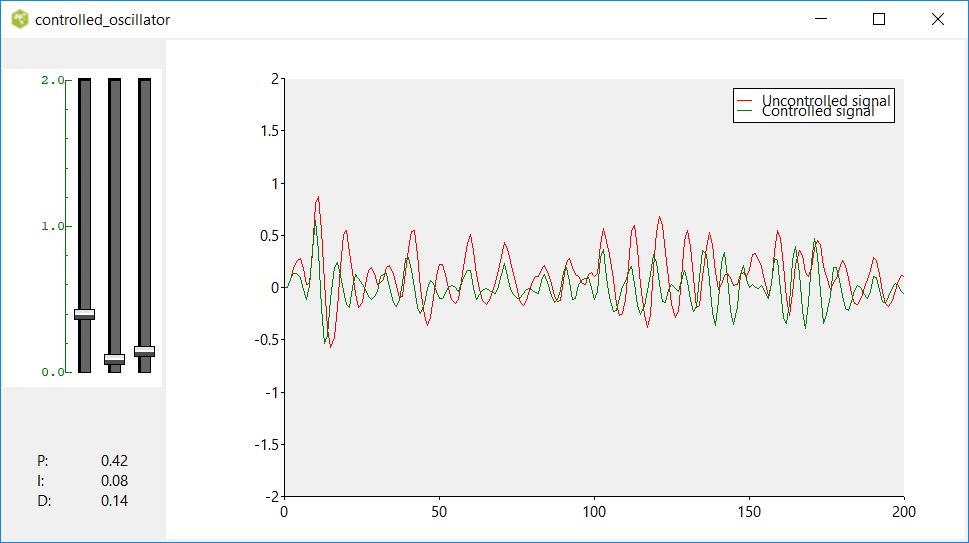
- The parameters of the PID controller can be changed via the sliders
Of course there are a few tricks involved:
- To avoid very frequent updates of the simulated oscillator, the procedure [showValues] schedules an update and if one was already scheduled, then the previous one is cancelled. That way, the update is performed only when you leave the sliders alone
- To compare the results, both an uncontrolled and the controlled oscillator are simulated, presented as a red and a green line
- To repeat the simulation, the random number generator is restarted with a fixed seed
And because I was too lazy to build a more conventional GUI, I made it such that things start when you change a slider.
I only hope I have implemented the simulation part correctly ;).
Note 1: It is a self-contained program, there is no attempt to read the VCD files (value change dump) that are typically used in this context.
Note 2: An alternative mode of operation could be to let the simulation continue and update the parameters "on the fly". The type of plot would have to be changed to a stripchart then.
# controlled_oscillator.tcl --
# Experiment with a simple linear oscillator:
# - Two degrees of freedom - the spring parameter and the damping coefficient.
# These are simply set to a fixed value.
# - The oscillator itself receives a random external force consisting of
# small peaks
# - The PID-controller has three parameters, P, I and D that can be
# changed via sliders in the GUI.
#
# Note:
# This could be set up in a more modular way, by using OOP.
#
package require controlwidget
package require Plotchart
package require math::calculus
# integrate --
# Integrate the equations and display the result
#
# Arguments:
# None
#
proc integrate {} {
global springStrength
global dampingCoeff
global force
global integratedX
global tstart
global tinterval
global tduration
set time 0.0
set tstep 0.1
set tcount 0
set tstart 0.0
set tinterval 0.3
set tduration 0.15
set springStrength 0.5
set dampingCoeff 0.2
set force 0.0
set integratedX 0.0
#
# Initial conditions:
# x, u - the uncontrolled position and velocity
# xc, uc - the controlled position and velocity
#
set x 0.0
set u 0.0
set xc $x
set uc $u
while { $time < 200.0 } {
lassign [::math::calculus::rungeKuttaStep $time $tstep [list $x $u $xc $uc] oscillator] x u xc uc
#puts "$time\t$x\t$u"
if { $tcount == 0 } {
$::p plot data1 $time $x
$::p plot data2 $time $xc
}
incr tcount
if { $tcount == 10 } {
set tcount 0
}
set time [expr {$time + $tstep}]
set integratedX [expr {$integratedX + $tstep * $xc}] ;# Do it outside the RK integration step!
}
}
# oscillator --
# Calculate the right-hand side of the equations
#
# Arguments:
# time Time in the simulation
# coords State variables
#
# Result:
# Vector representing the right-hand side
#
proc oscillator {time coords} {
global springStrength
global dampingCoeff
lassign $coords x u xc uc
set f [externalForce $time]
set g [pidSteering $xc $uc]
set du [expr {-$springStrength * $x - $dampingCoeff * $u + $f}]
set duc [expr {-$springStrength * $xc - $dampingCoeff * $uc + $f + $g}]
set dx $u
set dxc $uc
return [list $dx $du $dxc $duc]
}
# externalForce --
# Calculate the external force as a series of random peaks
#
# Arguments:
# time Time in the simulation
#
# Result:
# 1.0 or 0.0 depending on the time and the random function
#
proc externalForce {time} {
global tstart
global tinterval
global tduration
global force
global integratedX
if { $time >= $tstart + $tinterval } {
set tstart $time
set r [expr {rand()}]
set force [expr {($r > 0.9)? 1.0 : 0.0}]
} else {
if { $time > $tstart + $tduration } {
set force 0.0
}
}
return $force
}
# pidSteering --
# Calculate the steering force using PID
#
# Arguments:
# x X coordinate (excursion from 0)
# u Velocity
#
# Result:
# Steering force
#
proc pidSteering {x u} {
global integratedX
global kp
global ki
global kd
set g [expr {- $kp * $x - $ki * $integratedX - $kd * $u }]
return $g
}
# showValues --
# Show the chosen values as text and run the simulation if opportune
#
# Arguments:
# var1 Name of the traced variable/array
# var2 Name of the element if an array is traced
# op The operation (always write in this case)
#
proc showValues {var1 var2 op} {
global afterid
lassign [set $var1] P I D
set ::slidertext [format "P:\t%.2f\nI:\t%.2f\nD:\t%.2f" $P $I $D]
if { $afterid != {} } {
after cancel $afterid
}
set afterid [after 100 updateParameters]
}
# updateParameters --
# Update the parameters and re-run the calculation
#
proc updateParameters {} {
global kp
global ki
global kd
lassign $::slidervar kp ki kd
$::p deletedata
expr {srand(1000)}
integrate
}
# setupGUI --
# Set up the GUI, consisting of the controls for the PID parameters
# and the graph
#
# Arguments:
# None
#
proc setupGUI {} {
global afterid
global slidervar
global slidertext
global p
set afterid {}
grid [::controlwidget::slider .slider -variable slidervar -from 0.0 -to 2.0 -number 3 -axisformat %.1f -axiscolor green -background white -height 300] \
[canvas .c -width 800 -height 500]
grid [::ttk::label .slidervars -textvariable slidertext] ^
set p [::Plotchart::createXYPlot .c {0 200 50} {-2.0 2.0 0.5}]
$p dataconfig data1 -colour red
$p dataconfig data2 -colour green
$p legend data1 "Uncontrolled signal"
$p legend data2 "Controlled signal"
set slidervar {0.0 0.0 0.0}
set slidertext "Change\nthe\nsliders"
trace add variable slidervar write showValues
}
# Start the GUI
#
setupGUI