Geneva Drive
Intro
Keith Vetter : 2006-08-24 : Have you ever wondered how film is moved through a movie projector?
It cannot be a continuous feed because each frame must pause in front of the lens for 1/24 of a second.
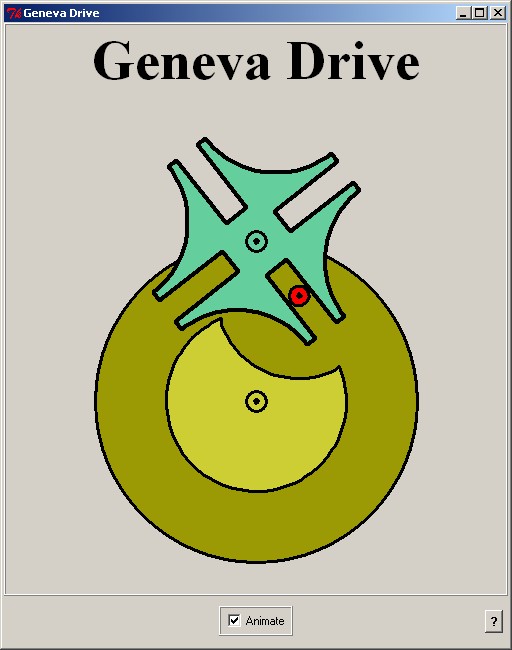
Enter the Geneva Drive, creating intermittent rotary motion from continuous rotary motion.
Also known as "Maltese Cross" Drive
A couple of interesting technical points.
First how do you create these complex shapes? The central gear could be drawn as a circle with a pie-slice arc drawn with the background color on top of it. But past experience has shown me that turning it into one polygon is much better: outline and fills are simple and rotation is much simpler. I used Regular Polygons 2 to turn two arcs into coordinate lists which I concatentated to form one polygon.
The upper, Maltese Cross shaped [L1 ] gear, is just the same shape, with one arc and five lines, repeated four times each rotated 90 degrees. So again I just concatenated several coordinate lists into one polygon.
Second, how do you rotate the shapes? Now that the shapes are polygons, rotation is simple with Canvas Rotation.
Third, how do you figure out the (non-constant) rotation speed of the Maltese Cross gear?
I had naively thought that as the bottom gear sweeps out the top 90 degrees, the top gear would turn at the same rate. Nope. I had to use vectors and the dot product to compute the angle between the center of the gear and the driving peg, and rotate the gear to match up.
Check out wikipedia [L2 ] for more information on this cool device.
Brilliant! -jcw
JAG - Keith, very nice. Having a mechanical background, I'm as fascinated with the device itself as I am with the Tcl code that models it. Thanks for sharing.
AMG: http://kmoddl.library.cornell.edu/model.php?m=316
AK: Wow. That is an interesting site for all things Kinematic.
AK: Some pictures of real-life geneva drives:
- http://blog.makezine.com/archive/2010/01/geneva_wheels_on_thingiverse.html
- http://www.thingiverse.com/thing:1642
- http://www.thingiverse.com/thing:1616
HJG: See also Scotch Yoke and Gear Animation
Jeff Smith 2019-05-04 : Below is an online demo using CloudTk
Please Note : This demo has a run time of 2 minutes.
Program
##+########################################################################## # # GenevaDrive.tcl -- Animates a geneva drive # by Keith Vetter, Aug 23, 2006 # package require Tk if {! [catch {package require tile}]} { namespace import -force ::ttk::checkbutton } set S(help) { How a film is moved through a movie projector? The film must advance frame by frame with each frame pausing in front of the lens for 1/24 of a second. This intermittent motion is achieved using a Geneva Drive. The name derives from the devices earliest application in mechanical watches, Geneva being an important center of watchmaking. Other application include pen change mechanism in plotters, automated sampling devices, and so on. } array set S {title "Geneva Drive" w 500 h 500 lw 3 animate 1 aid "" delay 10 angle 0 angle2 45} # Gear centers and radii set V(gear1,o) {0 57} set V(gear1,r0) 2 set V(gear1,r1) 10 set V(gear1,r2) 90 set V(gear1,r3) 161 set V(gear1,clr,r1) \#ccce34 set V(gear1,clr,r2) \#ccce34 set V(gear1,clr,r3) \#9c9a04 # Driving peg set V(gear1,o2) {-114 0} set V(gear1,p) 0 ;# Used for computing angles set V(gear1,r10) 2 set V(gear1,r11) 10 set V(gear1,r12) 83 set V(gear1,clr,p) black set V(gear1,clr,r0) black set V(gear1,clr,r10) black set V(gear1,clr,r11) red set V(gear1,clr,r12) \#ccce34 set V(gear2,o) {0 -103} set V(gear2,r0) 2 set V(gear2,r1) 10 set V(gear2,clr) \#64ce9c set V(gear2,clr,r0) black set V(gear2,clr,r1) \#64ce9c proc DoDisplay {} { global S wm title . $S(title) frame .top -bd 2 -relief ridge frame .bottom -bd 0 label .title -text $S(title) -font {Times 42 bold} button .? -text "?" -command About catch {.? config -font "[.? cget -font] bold"} checkbutton .anim -variable S(animate) -text Animate -command Animate catch {.anim config -relief ridge -pady 5 -padx 5} canvas .c -width $S(w) -height $S(h) -bd 0 -highlightthickness 0 bind .c <Configure> {ReCenter %W %h %w} pack .title -in .top -side top -fill x pack .c -in .top -side top -fill both -expand 1 pack .top -side top -fill both -expand 1 pack .bottom -side bottom -fill x -expand 1 pack .anim -in .bottom -side left -expand 1 -pady 10 place .? -in .bottom -relx .99 -rely .5 -anchor e } proc ReCenter {W h w} { ;# Called by configure event set h2 [expr {$h / 2}] ; set w2 [expr {$w / 2}] $W config -scrollregion [list -$w2 -$h2 $w2 $h2] } proc Gear1 {} { global V S lassign $V(gear1,o) x0 y0 # Big disk and middle pin foreach who {r3 r1 r0} { set xy [MakeBox $x0 $y0 $V(gear1,$who)] .c create oval $xy -tag gear1,$who -fill $V(gear1,clr,$who) \ -width $S(lw) } # Outer peg lassign $V(gear1,o2) x1 y1 set x1 [expr {$x0 + $x1}] set y1 [expr {$y0 + $y1}] foreach who {p r11 r10} { set xy [MakeBox $x1 $y1 $V(gear1,$who)] set xy2 [eval RegularPolygon2 $xy -start 0 -extent 360] .c create polygon $xy2 -tag [list gear1 gear1,$who] \ -fill $V(gear1,clr,$who) -width $S(lw) -outline black } # Rotating inner disk: concatentation of two arcs set xy2 [eval RegularPolygon2 [MakeBox $x0 $y0 $V(gear1,r2)] -start 135 -extent 270] set xy3 [eval RegularPolygon2 [MakeBox $x1 $y1 $V(gear1,r12)] -start -47 -extent -94] set xy [concat $xy2 $xy3] .c create polygon $xy -tag gear1 -fill $V(gear1,clr,r2) -outline black -width $S(lw) .c raise gear1,r1 .c raise gear1,r0 } proc Gear2 {} { global V S lassign $V(gear1,o) x0 y0 lassign $V(gear2,o) Gx Gy set xy [MakeBox $x0 $y0 $V(gear1,r2)] set xy0 [eval RegularPolygon2 $xy -start 135 -extent 90] # Create one cusp and inlet lassign [lrange $xy0 end-1 end] x1 y1 set dx [expr {$x1-$x0}] set dy [expr {$y1-$y0}] set dist [expr {hypot($dx,$dy)}] set nx [expr {$dy}] set ny [expr {-$dx}] set x2 [expr {$x1 + $dx * 10 / $dist}] set y2 [expr {$y1 + $dy * 10 / $dist}] set x3 [expr {$x2 + $nx * 80 / $dist}] set y3 [expr {$y2 + $ny * 80 / $dist}] set x4 [expr {$x3 + $dx * 26 / $dist}] set y4 [expr {$y3 + $dy * 26 / $dist}] set x5 [expr {$x4 - $nx * 80 / $dist}] set y5 [expr {$y4 - $ny * 80 / $dist}] set x6 [expr {$x5 + $dx * 10 / $dist}] set y6 [expr {$y5 + $dy * 10 / $dist}] lappend xy0 $x1 $y1 $x2 $y2 $x3 $y3 $x4 $y4 $x5 $y5 $x6 $y6 # Rotate 3 times and join all the points set xy1 [RotateCoords $xy0 $Gx $Gy -90] set xy2 [RotateCoords $xy0 $Gx $Gy -180] set xy3 [RotateCoords $xy0 $Gx $Gy -270] set xy [concat $xy0 $xy1 $xy2 $xy3] .c create poly $xy -tag gear2 -fill $V(gear2,clr) -outline black -width 4 foreach who {r1 r0} { set xy [MakeBox $Gx $Gy $V(gear2,$who)] .c create oval $xy -tag gear2,$who -fill $V(gear2,clr,$who) -width $S(lw) } } proc MakeBox {x y r} { return [list [expr {$x-$r}] [expr {$y-$r}] [expr {$x+$r}] [expr {$y+$r}]] } # from https://wiki.tcl-lang.org/Regular%20Polygons%202 proc RegularPolygon2 {x0 y0 x1 y1 args} { array set V {-sides 0 -start 90 -extent 360} ;# Default values foreach {a value} $args { if {! [info exists V($a)]} {error "unknown option $a"} if {$value == {}} {error "value of \"$a\" missing"} set V($a) $value } if {$V(-extent) == 0} {return {}} set xm [expr {($x0+$x1)/2.}] set ym [expr {($y0+$y1)/2.}] set rx [expr {$xm-$x0}] set ry [expr {$ym-$y0}] set n $V(-sides) if {$n == 0} { ;# 0 sides => circle set n [expr {round(($rx+$ry)*0.5)}] if {$n <= 2} {set n 4} } set dir [expr {$V(-extent) < 0 ? -1 : 1}] ;# Extent can be negative if {abs($V(-extent)) > 360} { set V(-extent) [expr {$dir * (abs($V(-extent)) % 360)}] } set step [expr {$dir * 360.0 / $n}] set numsteps [expr {1 + double($V(-extent)) / $step}] set xy {} set DEG2RAD [expr {acos(-1)*2/360}] for {set i 0} {$i < int($numsteps)} {incr i} { set rad [expr {($V(-start) - $i * $step) * $DEG2RAD}] set x [expr {$rx*cos($rad)}] set y [expr {$ry*sin($rad)}] lappend xy [expr {$xm + $x}] [expr {$ym - $y}] } # Figure out where last segment should end if {$numsteps != int($numsteps)} { # Vecter V1 is last drawn vertext (x,y) from above # Vector V2 is the edge of the polygon set rad2 [expr {($V(-start) - int($numsteps) * $step) * $DEG2RAD}] set x2 [expr {$rx*cos($rad2) - $x}] set y2 [expr {$ry*sin($rad2) - $y}] # Vector V3 is unit vector in direction we end at set rad3 [expr {($V(-start) - $V(-extent)) * $DEG2RAD}] set x3 [expr {cos($rad3)}] set y3 [expr {sin($rad3)}] # Find where V3 crosses V1+V2 => find j s.t. V1 + kV2 = jV3 set j [expr {($x*$y2 - $x2*$y) / ($x3*$y2 - $x2*$y3)}] lappend xy [expr {$xm + $j * $x3}] [expr {$ym - $j * $y3}] } return $xy } # From https://wiki.tcl-lang.org/CanvasRotation proc RotateItem {w tagOrId Ox Oy angle} { set angle [expr {$angle * atan(1) * 4 / 180.0}] ;# Radians foreach id [$w find withtag $tagOrId] { ;# Do each component separately set xy {} foreach {x y} [$w coords $id] { # rotates vector (Ox,Oy)->(x,y) by angle clockwise set x [expr {$x - $Ox}] ;# Shift to origin set y [expr {$y - $Oy}] set xx [expr {$x * cos($angle) - $y * sin($angle)}] ;# Rotate set yy [expr {$x * sin($angle) + $y * cos($angle)}] set xx [expr {$xx + $Ox}] ;# Shift back set yy [expr {$yy + $Oy}] lappend xy $xx $yy } $w coords $id $xy } } proc RotateCoords {xy Ox Oy angle} { set angle [expr {$angle * atan(1) * 4 / 180.0}] ;# Radians set xy2 {} foreach {x y} $xy { # rotates vector (Ox,Oy)->(x,y) by angle clockwise set x [expr {$x - $Ox}] ;# Shift to origin set y [expr {$y - $Oy}] set xx [expr {$x * cos($angle) - $y * sin($angle)}] ;# Rotate set yy [expr {$x * sin($angle) + $y * cos($angle)}] set xx [expr {$xx + $Ox}] ;# Shift back set yy [expr {$yy + $Oy}] lappend xy2 $xx $yy } return $xy2 } proc About {} { set msg "$::S(title)\nby Keith Vetter, August 2006\n$::S(help)" tk_messageBox -message $msg -title "About $::S(title)" } proc Animate {} { after cancel $::S(aid) StepIt 1 if {$::S(animate)} { set ::S(aid) [after $::S(delay) Animate] } } proc StepIt {dir} { global S V lassign $V(gear1,o) x0 y0 RotateItem .c gear1 $x0 $y0 $dir set S(angle) [expr {($S(angle) + $dir) % 360}] if {$S(angle) == 45} { set S(angle2) 45 } elseif {$S(angle) > 45 && $S(angle) <= 135} { lassign $V(gear2,o) Gx Gy lassign [.c coords gear1,p] x1 y1 set dx [expr {$x1 - $Gx}] ; set dy [expr {$y1 - $Gy}] set degree [expr {round((acos($dy /hypot($dx,$dy))) * 180 / acos(-1))}] set S(degree) $degree set da [expr {-abs($degree - abs($S(angle2)))}] if {$da != 0} { RotateItem .c gear2 $Gx $Gy $da incr S(angle2) $da } } } DoDisplay Gear1 Gear2 Animate return